I sistemi di visione per guida robot 3D progettati per il bin picking

In fase di realizzazione di un'applicazione di guida robot 3D, oltre alle classiche tematiche di selezione del modello di robot e relative apparecchiature periferiche opportune, si possono presentare delle sfide ardue anche per i progettisti e gli operatori più esperti. Questa pagina descrive le precauzioni da prendere durante lo sviluppo di un'applicazione di presa da cassone e i vantaggi portati dall'utilizzo dei sistemi di visione per guida robot 3D RB di KEYENCE.
Scopri di più sui nostri prodotti scaricando il nostro catalogo.
Scarica catalogo
Cos'è il bin picking?
Il bin picking è il prelievo di pezzi individuali, anche alla rinfusa, da un cassone. Esempi includono il prelievo di target da contenitori e cassoni durante l’assemblaggio e la pallettizzazione/depallettizzazione di prodotti per classificare i pacchetti ad ogni destinazione di consegna. L’esecuzione del bin picking tramite guida robot richiede un robot industriale, una telecamera per il riconoscimento della posizione del target e un sistema di elaborazione delle immagini flessibile che controlla il braccio robot in base ai dati acquisiti dalle immagini. Durante il prelievo, occorre il riconoscimento dello spazio che include non solo le dimensioni X e Y 2D, ma anche l’altezza del target 3D. La necessità della terza dimensione è il fattore di differenziazione tra la scelta di sistemi di visione artificiale per guida robot 2D o 3D.
PROMEMORIA
Che cosa sono i sistemi di visione per guida robot 3D?

Il sistema di visione per guida robot 3D è un sistema di telecamere utilizzato per guidare un robot industriale in operazioni di prelievo, deposito e ispezione.
Si comporta come se fosse gli occhi del robot industriale, fornendo le traiettorie da seguire per evitare collisioni.
Grazie ai sistemi di visione artificiale per guida robot 3D non sono più necessari gli alimentatori di componenti o gli operatori che li allineano manualmente.

I sistemi di visione per guida robot 2D possono riconoscere i target su una superficie piana, ma la loro abilità di riconoscere target impilati è limitata. Ecco perché la presa da cassone con un robot richiede una telecamera 3D. È necessario selezionare la configurazione corretta del sistema di telecamere in base all’oggetto da rilevare e all’azione prevista del robot. KEYENCE fornisce sistemi di visione per guida robot sia 2D che 3D, il che ci permette di offrire ai clienti la soluzione ottimale per le loro applicazioni.
Scopri di più sui nostri prodotti scaricando il nostro catalogo.
Scarica catalogo
Target per applicazioni di random bin picking e prelievo di oggetti impilati
Spesso l’aspetto più importante nella decisione di installare o meno i sistemi di visione per guida robot 3D riguarda il genere di target da prelevare. I sistemi di visione artificiale RB di KEYENCE sono in grado di effettuare il riconoscimento 3D ad alta precisione di diverse tipologie di parti e prodotti, comprese forme con superfici curve, oggetti morbidi e strutture complicate. Inoltre, permettono di rilevare oggetti di ogni dimensione, da piccoli come viti e bulloni a ingranaggi automobilistici e bielle, fino ad oggetti più grandi, come componenti di veicoli quali marmitte. Il sistema può anche rilevare diversi materiali come metallo, plastica e gomma. La varietà di parti e prodotti che possono essere prelevati grazie al sistema di visione per guida robot 3D KEYENCE include molto altro, come cilindri, pannelli sottili e parti con finiture lucide e brillanti.

Albero a gomiti

Biella

Alloggiamento della trasmissione

Radiatore

Base differenziale

Alloggiamento di giunti CV

Metallo stampato

Dispositivi di fissaggio

Componente HVAC

Parte in metallo sinterizzato

Batteria
Esempi di applicazione di bin picking per tipologia di target
È possibile prelevare in modo stabile target di varie forme e materiali. Per i dettagli, vedere i video seguenti.
Presa da cassone di supporti per alberi
Le quattro telecamere acquisiscono le immagini dei pezzi all'interno cassone da diverse angolazioni per generare un'unica immagine 3D affidabile senza punti ciechi.
Presa da cassone di target in metallo lucido
Il proiettore LED di nuovo sviluppo e i sensori CMOS ad alta sensibilità consentono un campo dinamico ampio senza precedenti, così è possibile rilevare anche i pezzi ad alta riflettività.
Presa da cassone di viti
Il processore integrato ad alta velocità consente un'esecuzione rapida degli algoritmi di ricerca 3D per ridurre drasticamente i tempi di lavorazione richiesti rispetto alla visione 3D standard per i robot.
Presa da cassone di lamiere metalliche sottili
Combinando quattro telecamere e un proiettore di luce strutturata, entrambi ad alta risoluzione, è possibile identificare anche le minime differenze di altezza, consentendo un rilevamento ad alta precisione anche delle caratteristiche di piccole parti.
Presa da cassone di cilindri in metallo
Il proiettore LED proietta molteplici pattern luminosi a strisce ad angoli di 90 gradi, riducendo l'impatto delle riflessioni dovute a superfici lucide.
Autocalibrazione 3D con un solo clic
È possibile effettuare facilmente la calibrazione con il clic di un pulsante, garantendo un metodo di calibrazione ad alta precisione e ripetibilità.
* Velocità di riproduzione: 4×

I sistemi di visione per guida robot 3D possono essere utilizzati per effettuare la presa da cassone di oggetti pesanti con forme complicate, come ad esempio un albero a gomiti di un motore automobilistico. Questi alberi a gomiti comporterebbero un grosso carico fisico sugli operatori, se dovessero prelevare manualmente questi target ripetutamente. Inoltre, la caduta di parti pesanti può comportare incidenti e danni alle macchine. La presa da cassone con l’utilizzo di sistemi di visione per guida robot 3D consente un prelievo e posizionamento preciso, in cui l’albero centrale di ogni albero a gomiti viene prelevato in base ai dati delle immagini acquisite. Questo metodo elimina il carico di lavoro sugli operatori, oltre a ridurre il rischio per gli operatori o le macchine.
Scopri di più sui nostri prodotti scaricando il nostro catalogo.
Scarica catalogo
Vantaggi del bin picking
L’installazione di sistemi di visione per guida robot 3D e l’esecuzione della presa da cassone fornisce vari vantaggi. Questa sezione presenta i benefici dell'utilizzo di un robot industriale per automatizzare il prelievo di oggetti random dal cassone.
Vantaggio 1 Risoluzione del problema della carenza di manodopera
La carenza di manodopera è un problema grave presso le sedi di produzione, ma questo problema può essere risolto passando ai robot per il lavoro di prelievo.
Vantaggio 2 Costi di manodopera ridotti
Con i robot che effettuano la presa da cassone, non occorre retribuire gli straordinari richiesti dai lavoratori umani quando effettuano lo stesso lavoro di prelievo, per una riduzione dei costi. Inoltre, i robot forniscono un funzionamento stabile per 24 ore al giorno.
Vantaggio 3 Automatizzazione della fornitura di parti
Convenzionalmente, per l’allineamento dei componenti si utilizzavano alimentatori e fissaggi in modo da facilitare il prelievo tramite robot. Grazie all’utilizzo dei sistemi di visione per guida robot 3D, non occorre allineare i componenti in questo modo, consentendo una riduzione delle ore di manodopera e un aumento della produttività complessiva.
Vantaggio 4 Prevenzione di prodotti difettosi
La presa da cassone tramite sistemi di visione per guida robot 3D elimina gli errori umani come la dimenticanza di posizionare i target nel punto giusto o il posizionamento di target orientati all’indietro, che comportano problemi durante l’allineamento dei target. È possibile evitare prodotti difettosi derivanti da questi errori.
Vantaggio 5 Uso efficiente dello spazio
Con l’aumento del numero di processi operativi e tipi di prodotti fabbricati, aumenta anche il numero di alimentatori di componenti e maschere, il che rende difficile trovare lo spazio per installare tutto. Tuttavia, con la presa da cassone tramite sistemi di visione per guida robot 3D, il numero di alimentatori di componenti e altri pezzi di apparecchiature periferiche può essere ridotto al minimo, permettendo la configurazione di linee di produzione in uno spazio limitato.
Vantaggio 6 Velocità di lavoro stabile
La velocità di lavoro varia in base all’esperienza dell’operatore nell'allineamento ed inserimento dei target nei robot. Tuttavia, l’utilizzo di robot industriali per ogni fase di processo, compresa la presa da cassone, massimizza la velocità di lavoro, permettendo tempi di ciclo più brevi.
La guida robot industriale 3D è compatibile con target di grandi dimensioni
La gestione manuale di target grandi o pesanti durante il prelievo sottopone gli operatori a un forte stress. Vi sono anche situazioni in cui due, tre o più operatori devono gestire un solo target. I robot possono prelevare i target in modo sicuro e affidabile anche se grandi o pesanti.
Applicazioni di sistemi di visione per guida robot 3D
In questa sezione sono presentate in modo dettagliato applicazioni chiave dei sistemi di guida robot 3D, come presa da cassone, pallettizzazione/depallettizzazione e prelievo di oggetti impilati tramite l'utilizzo di robot industriali. Sono anche supportate varie altre applicazioni, per cui non esitate a contattare KEYENCE per maggiori informazioni. Proporremo il modo ottimale per implementare i sistemi di visione per guida robot 3D secondo la vostra esigenza.

Bin Picking
Tradizionalmente, il prelievo prevedeva azioni gravose, come il posizionamento di componenti nelle maschere, l’allineamento dei componenti sui vassoi e l’installazione di alimentatori di componenti. I sistemi di visione per guida robot 3D possono essere utilizzati per riconoscere parti sparse e anche per eseguire un prelievo di oggetti alla rinfusa. Si tratta di un metodo efficiente, dal momento che elimina il problema di allineare i target e la necessità degli operatori di farlo, riducendo al minimo anche la quantità di apparecchiature periferiche.

Pallettizzazione/depallettizzazione
Per “pallettizzazione” si intende il caricamento di pacchetti su un pallet, mentre per “depallettizzazione” si intende lo scarico di questi pacchetti. L’automatizzazione di questa attività tradizionalmente richiedeva un dispositivo apposito: un pallettizzatore o un sistema di pallettizzazione. Tuttavia, è possibile utilizzare i sistemi di visione per guida robot 3D per supportare questo lavoro con un normale robot industriale.

Prelievo impilato
Per “impilaggio” si intende il processo di posizionamento di scatole e contenitori simili gli uni sugli altri. Si tratta di un’applicazione perfetta per i sistemi di visione per guida robot 3D, dal momento che questo sistema fornisce la posizione precisa nelle direzioni X e Y, oltre che Z, per determinare l’altezza dei target.
Scopri di più sui nostri prodotti scaricando il nostro catalogo.
Scarica catalogo
Caratteristiche dei sistemi di visione per guida robot 3D di KEYENCE

Il sistema di visione per guida robot 3D di KEYENCE, Serie CV-X480D, è stato progettato appositamente per la presa da cassone. Questa sezione presenta le caratteristiche del sistema.

Avvicinamento affidabile ai target, anche all'interno di contenitori profondi
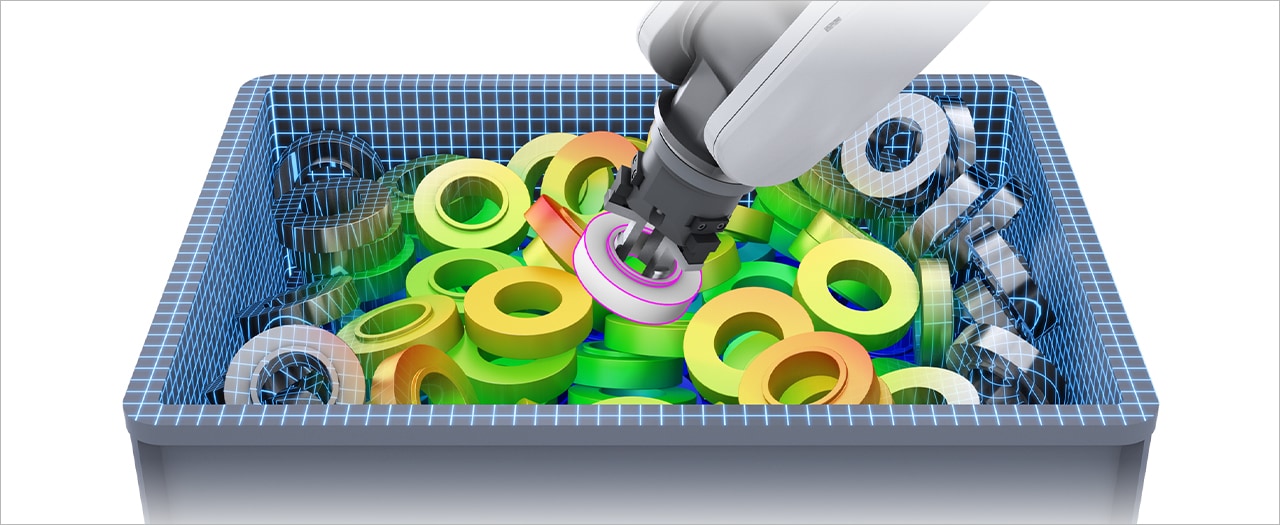
Il sistema di visione per guida robot 3D CV-X480D è in grado di rilevare ed individuare i target senza essere influenzato da punti ciechi o posizioni oscure dei componenti. La funzione di ricerca 3D di nuova concezione utilizza quattro telecamere separate per creare un’immagine 3D priva di punti ciechi, per determinare la posizione e l’orientamento di ogni singolo pezzo. Il sistema consente il prelievo di target senza collisioni con il contenitore o altri target, anche se l'oggetto si trova all’interno di un contenitore profondo.
Calcolo automatico dei movimenti del robot in base all’ambiente circostante
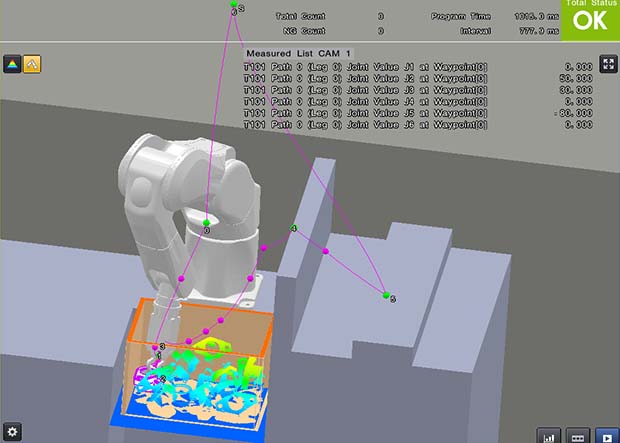
Il sistema di visione per guida robot 3D Serie CV-X480D è dotato di uno strumento di pianificazione del percorso che calcola automaticamente i movimenti del robot. Questo consente di evitare collisioni con i componenti, con il contenitore stesso e qualsiasi altro ostacolo nelle vicinanze. Questo percorso viene calcolato tenendo in considerazione il layout delle celle e le limitazioni di movimento del robot. Inoltre, il sistema di visione artificiale è dotato di un simulatore di prelievo che può essere utilizzato per ispezionare e programmare le posizioni di prelievo del componente prima del test sul campo, migliorando notevolmente il tasso di successo di prelievo dei target e di svuotamento totale del cassone.

Inserimento automatico dei componenti senza la necessità di cambiare i tools o di stoccaggio dei componenti
L’installazione di un sistema di visione per guida robot 3D consente l’inserimento automatico dei componenti, senza la necessità di cambi di strumentazione. Con un tempo minimo, è possibile includere più tipi di prodotti, per notevoli riduzioni dei tempi di ciclo. Inoltre, CV-X480D è dotato di taratura 3D automatica, che consente una configurazione omogenea, limitando la necessità di regolazioni manuali.

Consente installazioni di robot industriali anche in spazi contenuti
Tradizionalmente, l’installazione di un robot industriale richiedeva apparecchiature periferiche e dispositivi come supporti e nastri trasportatori. Con i sistemi di visione per guida robot 3D, nessuno di questi elementi è più necessario, per cui è possibile automatizzare i processi installando un robot industriale anche in spazi piccoli e ristretti. Inoltre, è possibile supportare più target con cambi di programmi, per cui questi sistemi sono adatti alle linee di produzione con più tipi di prodotti.
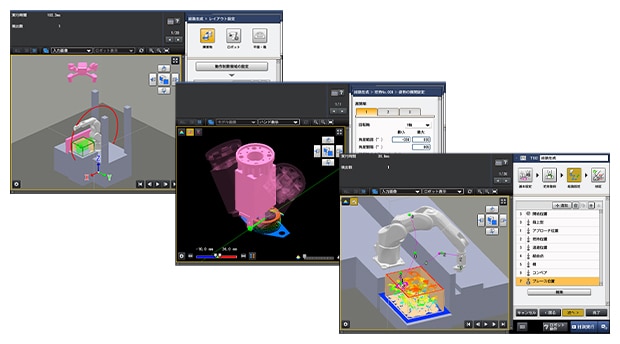
Esempi reali di utilizzo delle funzioni di pianificazione del percorso robot / simulatore di prelievo
Con i prodotti KEYENCE, è possibile calcolare il percorso ottimale del robot in modo automatico, tenendo in considerazione le collisioni con le apparecchiature periferiche e la posizione del robot. Nei seguenti video sono presentati in modo dettagliato alcuni esempi di applicazioni.
Valutazione delle collissioni tra braccio robotico e cassone
Oltre a rilevare la posizione di presa necessaria per prelevare un pezzo, il sistema genererà il percorso completo del robot per eliminare tutte le collisioni tra il braccio robotico, il cassone e l'ambiente.
Evitare ostacoli
Viene calcolato un percorso sicuro di movimento per ogni pezzo prelevato. Questo percorso tiene conto della posizione del pezzo nelle pinze e del valore di ogni angolo dei giunti robotici, per eliminare singolarità e il superamento dei limiti di rotazione impostati.
Riposizionamento al centro
Questa funzione permette di far scorrere prima verso il centro del cassone i pezzi che non possono essere correttamente prelevati a causa della prossimità alla parete. Una seconda acquisizione consentirà poi di rimuovere il pezzo dal cassone.
Sollevamento durante lo spostamento dal lato del box
Se un pezzo è incuneato contro il lato del cassone, questa funzione adatta il movimento di prelievo per scaricare il pezzo in orizzontale, oltre che in verticale.
Scarico di target sovrapposti
Il sistema può rilevare se un pezzo è sovrapposto ad altri nel cassone e generare un percorso per liberarlo facendolo scorrere, prima di rimuoverlo.
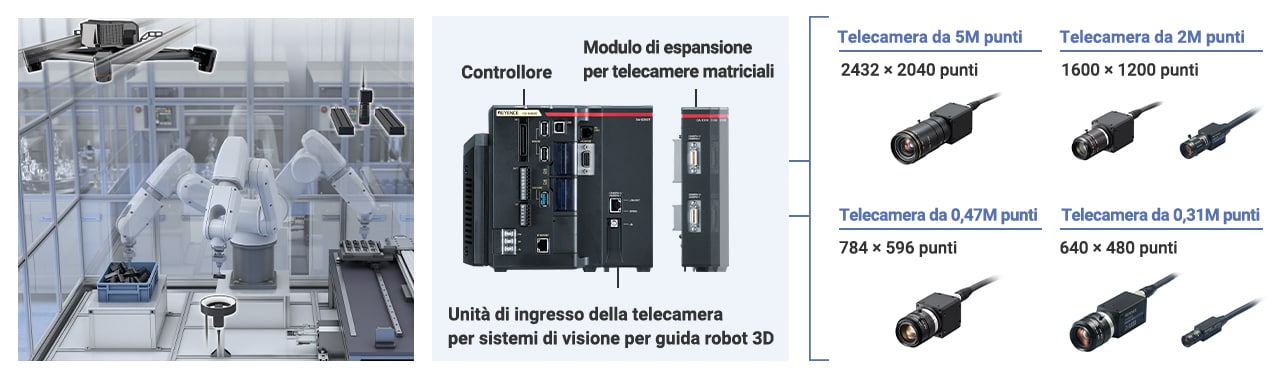
Sistemi di visione per guida robot 3D in combinazione con una telecamera matriciale
È inoltre possibile installare fino a due telecamere matriciali insieme alla telecamera 3D RB. Insieme alla telecamera 3D per la presa da cassone, è possibile utilizzare telecamere matriciali dopo il prelievo, per effettuare attività come correzione della presa e Pick and Place. La combinazione di sistemi di visione per guida robot 3D con una telecamera matriciale in questo modo fornisce una maggiore precisione e consente l’esecuzione simultanea di diversi tipi di lavoro.

Correzione del disallineamento della presa/controllo della differenza del tipo di prodotto
L'utilizzo di sistemi di visione per guida robot 2D consente un posizionamento ad alta precisione dopo la presa da cassone. Esegue contemporaneamente verifiche e ispezioni di target in relazione al tipo di prodotto, fronte/retro e orientamento e molto altro.

Correzione dello spostamento della posizione
L'utilizzo di sistemi di visione per guida robot 2D permette operazioni di Pick and Place, rilevando la posizione del vassoio su cui verranno collocati i prodotti. Il sistema calcolerà lo scostamento in relazione alla posizione registrata, per posizionare correttamente i componenti.

Facilità di collegamento con i sistemi di visione per guida robot 2D
CV-X480D di KEYENCE può collegarsi facilmente ai sistemi di visione per guida robot 2D. Basta selezionare l’applicazione in base al tipo di operazione correttiva richiesta per ottenere la configurazione più rapida e ideale.
Operazioni come controlli delle differenze tra tipi di prodotti e ispezioni di presenza/assenza effettuate contemporaneamente alla presa da cassone
L’aggiunta di una telecamera matriciale al sistema di visione per bin picking consente un funzionamento efficiente in cui controlli delle differenze tra tipi di prodotti e ispezioni di presenza/assenza vengono effettuati contemporaneamente alla presa da cassone.
Motivi per cui le persone scelgono i sistemi di visione per guida robot 3D di KEYENCE
Questa sezione presenta le carattersitiche specifiche che rendono il sistema di visione per guida robot 3D CV-X480D di KEYENCE leader nelle applicazioni di bin picking e i motivi per cui offre vantaggi ai clienti.

Sistemi ottici sviluppati da KEYENCE
Le quattro telecamere del sistema di visione per guida robot 3D CV-X480D acquisiscono ogni target da diverse angolazioni, eliminando i punti ciechi e creando un’immagine 3D incredibilmente stabile. Inoltre, il sensore CMOS ad alta precisione integrato, il processore ad alta velocità e il proiettore LED appositamente progettato consentono un rilevamento di target ad alta precisione.
Simulatore di prelievo e riproduzione dei target alla rinfusa all'interno del cassone
Il motore fisico dedicato del sistema di visione per bin picking CV-X480D è in grado di riprodurre una simulazione realistica di un accumulo di target su un PC, senza la necessità di preparare pezzi o contenitori reali. La simulazione su PC è una riproduzione ad alta precisione del sito di lavoro, che permette di ridurre il problema di predisporre l’apparecchiatura effettiva.
Strumento di pianificazione dei percorsi integrato
Il sistema di visione per guida robot 3D CV-X480D è dotato di uno strumento di pianificazione dei percorsi e un simulatore di prelievo integrati, da utilizzare per effettuare simulazioni su un PC. Una volta integrato il layout dell’ambiente nello strumento di pianificazione dei percorsi, il percorso ottimale, in cui vengono evitati tutti gli ostacoli, può essere calcolato automaticamente. Un vantaggio di questo strumento è la possibilità di ricostruire il layout all'interno del software, posizionando il robot, il cassone e gli ostacoli. Inoltre, le operazioni di apprendimento, come le posizioni di presa del target, sono effettuate semplicemente usando il mouse. Non sono necessarie conoscenze specialistiche per poter completare la configurazione.
Contattateci per maggiori informazioni sul sistema di visione per bin picking KEYENCE Serie CV-X480D o consultate il catalogo gratuito.